 The system consists of train dispatching and ore proportioning unit (digital ore distribution system, train dispatching system), train unit (underground train transportation system, automatic train protection system), operation unit (underground signal centralized closed system, operation console system, wireless communication system), ore loading unit (remote chute loading system, video monitoring system of remote chute loading), and unloading unit (automatic underground unloading station system and automatic cleaning system).
The system consists of train dispatching and ore proportioning unit (digital ore distribution system, train dispatching system), train unit (underground train transportation system, automatic train protection system), operation unit (underground signal centralized closed system, operation console system, wireless communication system), ore loading unit (remote chute loading system, video monitoring system of remote chute loading), and unloading unit (automatic underground unloading station system and automatic cleaning system).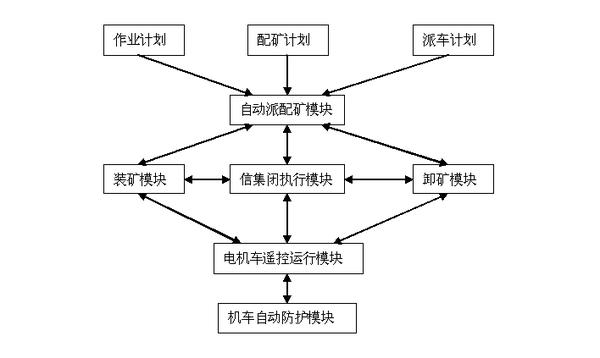 The train unit includes underground train transportation system and automatic train protection system. Install the automatic industrial control system on the train, which can communicate with the console control system in the control room through wireless and wired networks, and accept various instructions from the console control system, and send the operation information of the train to the console control system. A network camera is installed on the front of the electric train which communicates with the ground control room via wireless network, to realize remote video monitoring of railroad conditions.
The train unit includes underground train transportation system and automatic train protection system. Install the automatic industrial control system on the train, which can communicate with the console control system in the control room through wireless and wired networks, and accept various instructions from the console control system, and send the operation information of the train to the console control system. A network camera is installed on the front of the electric train which communicates with the ground control room via wireless network, to realize remote video monitoring of railroad conditions.
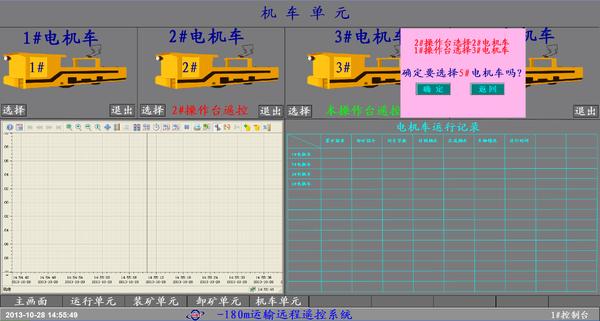 Through the integration of signal centralized closed system, train commanding system, precise position detection system, wireless communication transmission system, video system and the ground console system, the system realizes operating underground electric train by remote control on the ground. Ground remote control operation: the train operator in the control room issues a ore loading application, the dispatcher sends ore loading instructions according to the production task, and the signal centralized closed system automatically changes the traffic lights according to the line conditions after receiving the instruction, and directs the train to the designated chute to load. The train operator remotely controls the train to run to the designated position through the handle. The system has the function of constant speed cruise, and the operator can set different speed at different intervals to reduce the workload of the operator. After reaching the target chute, the operator remotely conducts ore drawing and move the train to the right position, ensure that the loaded ore quantity meets the process requirements; after finishing ore loading, apply for unloading, and after receiving the application, signal centralized closed system automatically judges the railways and command the train to the unloading station to unload ores, then completing a loading and unloading cycle. Fully automatic operation: According to the command information from digital ore proportioning and distribution system, the signal centralized closed system automatically responds, commands and control signal lights and switch machines to form the running route from the unloading station to the loading point, and from the loading point to the unloading station. The train fully automatically runs according to the comprehensive information and commands of the ore proportioning and train dispatching system and the signal centralized closed system. In running, based on the precise train positioning system, the specific position of the train is determined, and the pantograph is automatically lifted and lowered according to the specific position of the train, and the train automatically runs at fixed speeds in different intervals.
Through the integration of signal centralized closed system, train commanding system, precise position detection system, wireless communication transmission system, video system and the ground console system, the system realizes operating underground electric train by remote control on the ground. Ground remote control operation: the train operator in the control room issues a ore loading application, the dispatcher sends ore loading instructions according to the production task, and the signal centralized closed system automatically changes the traffic lights according to the line conditions after receiving the instruction, and directs the train to the designated chute to load. The train operator remotely controls the train to run to the designated position through the handle. The system has the function of constant speed cruise, and the operator can set different speed at different intervals to reduce the workload of the operator. After reaching the target chute, the operator remotely conducts ore drawing and move the train to the right position, ensure that the loaded ore quantity meets the process requirements; after finishing ore loading, apply for unloading, and after receiving the application, signal centralized closed system automatically judges the railways and command the train to the unloading station to unload ores, then completing a loading and unloading cycle. Fully automatic operation: According to the command information from digital ore proportioning and distribution system, the signal centralized closed system automatically responds, commands and control signal lights and switch machines to form the running route from the unloading station to the loading point, and from the loading point to the unloading station. The train fully automatically runs according to the comprehensive information and commands of the ore proportioning and train dispatching system and the signal centralized closed system. In running, based on the precise train positioning system, the specific position of the train is determined, and the pantograph is automatically lifted and lowered according to the specific position of the train, and the train automatically runs at fixed speeds in different intervals.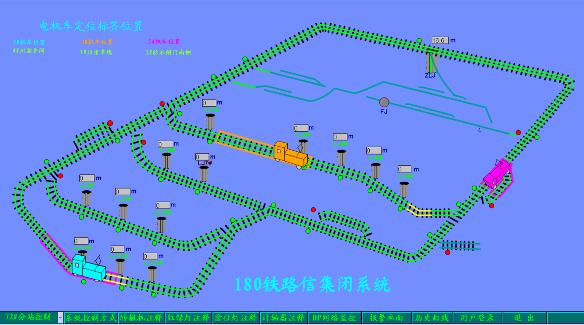
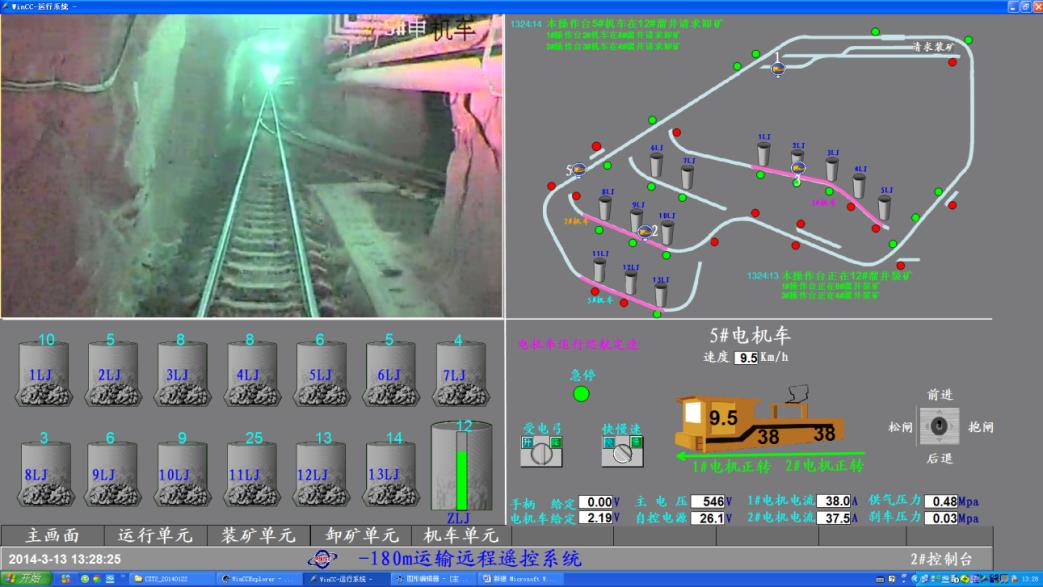
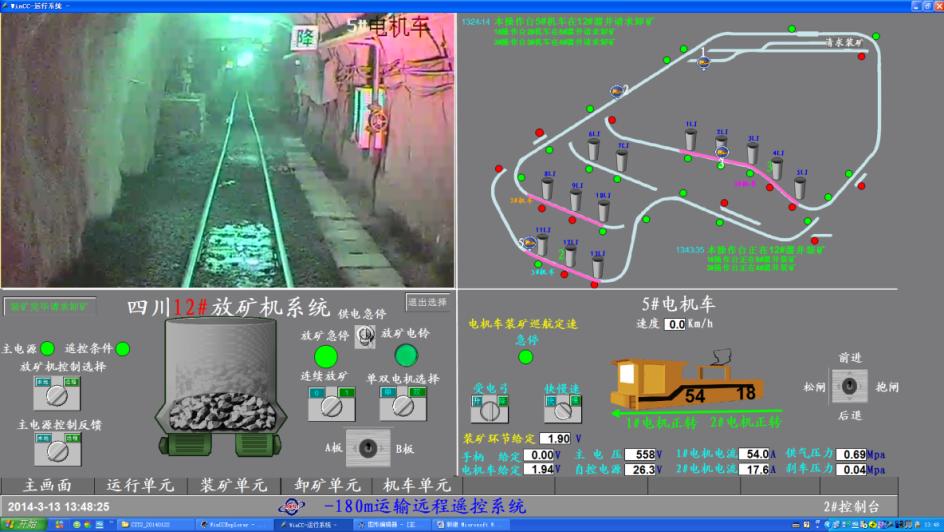
 When the train arrives at the loading chute, the operator selects and confirms the needed chute through upper-level computer display, to connect relationship between the controlled chute and the ground control system, and issues commands to control the selected chute. By switching the video monitoring screen of each feeder, the vibrating feeder and the train are operated in a unified and coordinated manner, so as to complete the remote loading process.
When the train arrives at the loading chute, the operator selects and confirms the needed chute through upper-level computer display, to connect relationship between the controlled chute and the ground control system, and issues commands to control the selected chute. By switching the video monitoring screen of each feeder, the vibrating feeder and the train are operated in a unified and coordinated manner, so as to complete the remote loading process.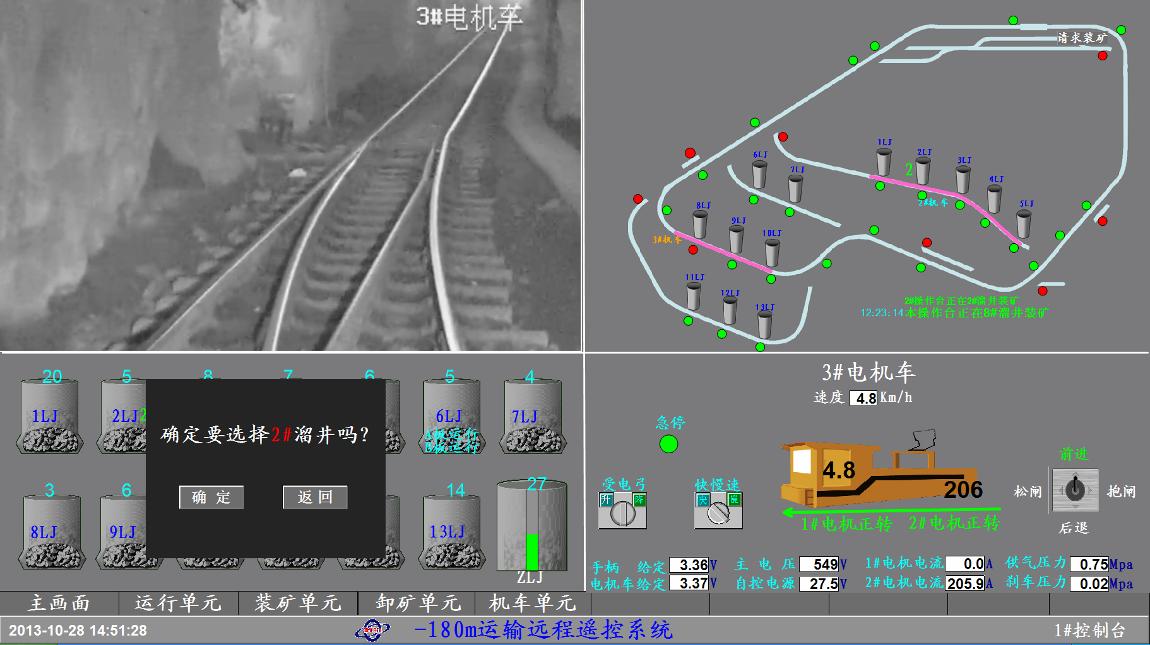
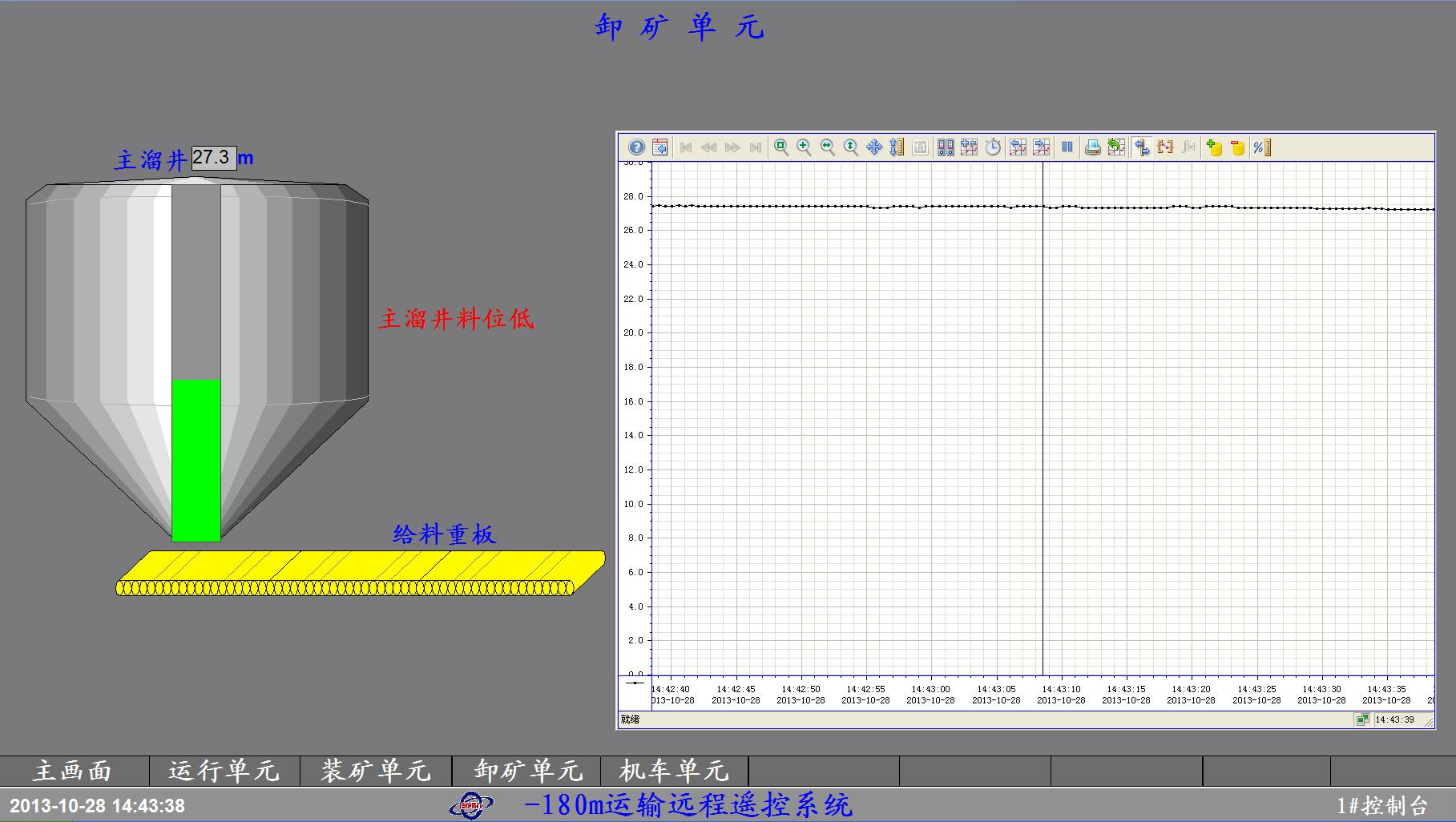
 Through the automatic unloading and cleaning system, the trains complete the automatic unloading operation. When the train enters the unloading station, the automatic operation control system controls the train’s speed to ensure that the train passes through the curved rail unloading device at a constant speed to complete the automatic unloading process. When unloading, the cleaning process is also finished automatically.
Through the automatic unloading and cleaning system, the trains complete the automatic unloading operation. When the train enters the unloading station, the automatic operation control system controls the train’s speed to ensure that the train passes through the curved rail unloading device at a constant speed to complete the automatic unloading process. When unloading, the cleaning process is also finished automatically.
 Through the video images, the operator operates the ore loading control system to realize remotely ore loading in ground control room.Realize no one working in the underground railway transportation process. Realize automatic train running and improves the system operation efficiency.Effects (1) Eliminate potential safety hazards and make the train running more standardized, efficient and stable; (2) Improve the transportation, production automation and informatization level, and promote management progress and revolution; (3) Improve working environment and improve the transportation production efficiency. Economic benefits (1) Through the optimized design, realize optimal ore proportioning, reduce train number and investment cost; (2) Reduce human resources cost; (3) Improve transportation efficiency and benefits; (4) To ensure stable ore quality; (5) Reduce the power consumption of trains.
Through the video images, the operator operates the ore loading control system to realize remotely ore loading in ground control room.Realize no one working in the underground railway transportation process. Realize automatic train running and improves the system operation efficiency.Effects (1) Eliminate potential safety hazards and make the train running more standardized, efficient and stable; (2) Improve the transportation, production automation and informatization level, and promote management progress and revolution; (3) Improve working environment and improve the transportation production efficiency. Economic benefits (1) Through the optimized design, realize optimal ore proportioning, reduce train number and investment cost; (2) Reduce human resources cost; (3) Improve transportation efficiency and benefits; (4) To ensure stable ore quality; (5) Reduce the power consumption of trains.